FusionPortable Research Dashboard
Overview of Our Contributions¶
Calibration¶
- PBACalib: Targetless LiDAR-Camera Extrinsic Calibration
IEEE Robotics and Automation Letter (RAL) 2023 - LCECalib: Target-Based LiDAR-Frame/Event Camera Extrinsic Calibration (Code)
IEEE/ASME Transactions on Mechatronics (T-MECH) 2023
Localization and Mapping¶
- PALoc: Advancing SLAM Benchmarking with Prior-Assisted 6-DoF Trajectory Generation and Uncertainty Estimation
IEEE/ASME Transactions on Mechatronics (T-MECH) 2024 - Cobra: Real-Time Metric-Semantic Mapping for Autonomous Navigation in Outdoor Environments (Code)
IEEE Transactions on Automation Science and Engineering (T-ASE) 2024
Perception¶
- FSNet: Full-Scale Unsupervised Monocular Depth Prediction
IEEE Transactions on Automation Science and Engineering (T-ASE) 2023
Datasets¶
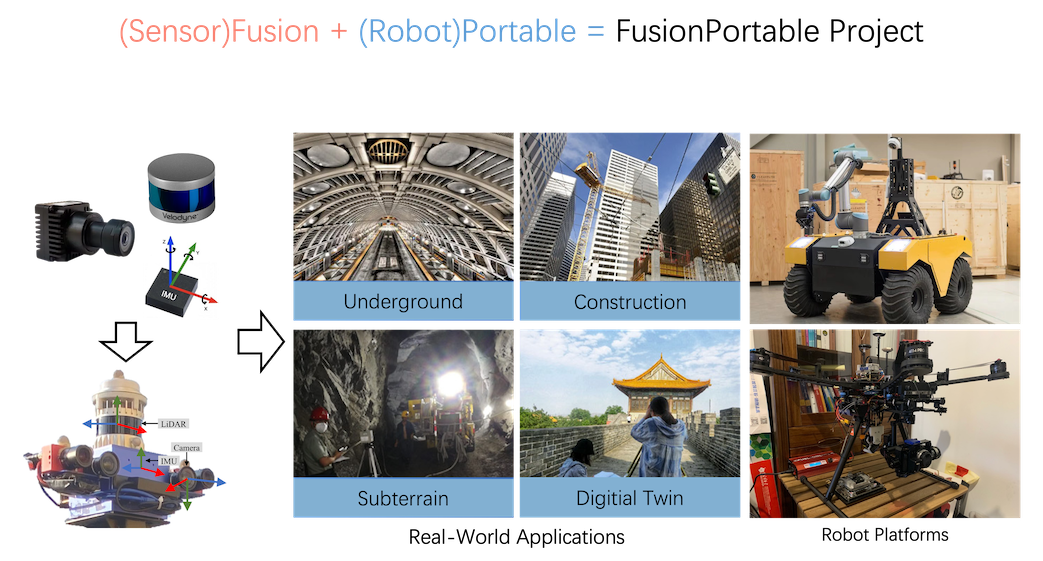
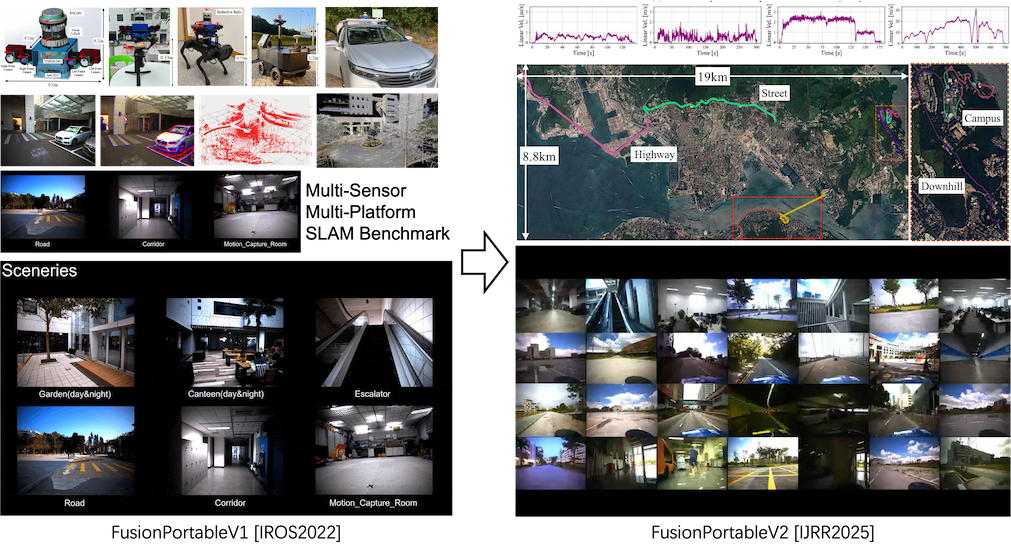
- FusionPortable: Multi-Sensor Campus-Scene Dataset on Diverse Platforms
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022 - FusionPortableV2: A Unified Multi-Sensor Dataset for Generalized SLAM Across Diverse Platforms and Scalable Environments
International Journal of Robotics Research (IJRR) 2024
Download FusionPortable Datasets¶
Please click the below link:
Contact/Cooperation¶
- Dr. Jianhao Jiao (jiaojh1994 at gmail dot com)
License¶
Cinder is licensed under the MIT license.