LCECalib
Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With A Globally Optimal Solution
Introduction¶
The combination of LiDARs-frame cameras-event cameras becomes a key factor to achieve robust perception of a mobile robot.
However, to jointly exploit these sensors, the challenging extrinsic calibration problem should be addressed. An automatic checkerboard-based extrinsic calibration approach is proposed. Four contributions are presented:
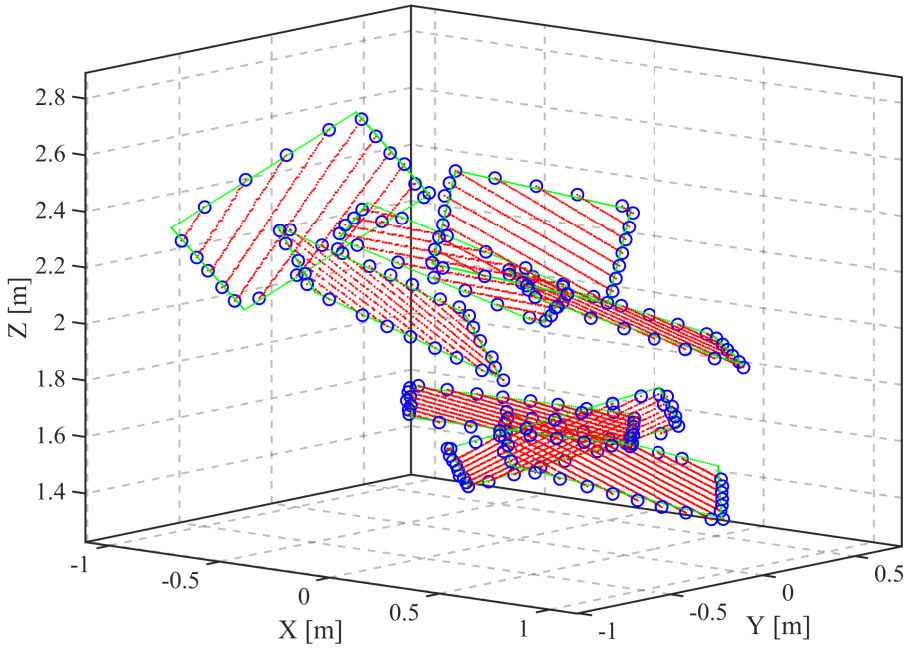
- Automatic feature extraction and checkerboard tracking method from LiDAR’s point clouds.
- Realistic frame images reconstruction from event streams, which are applied by traditional corner detectors.
- An initialization-refinement procedure to estimate extrinsics.
- A unified and globally optimal solution.
Sensors¶

Experiments¶
Reconstructed images from events¶



Projecting points onto images with calibrated extrinsics¶




Code¶
The dataset tool can be used by clicking the button below
Publications¶
- LCECalib: Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With A Globally Optimal Solution
Jianhao Jiao, Feiyi Chen, Hexiang Wei, Jin Wu, Ming Liu
IEEE/ASME Transactions on Mechatronics (T-MECH), 2023
[bibtex]