FusionPortable V2-Experiments
Experiments¶
Localization Evaluation¶
Running FAST-LIO2: handheld_room00, legged_grass00, ugv_campus00, vehicle_highway00
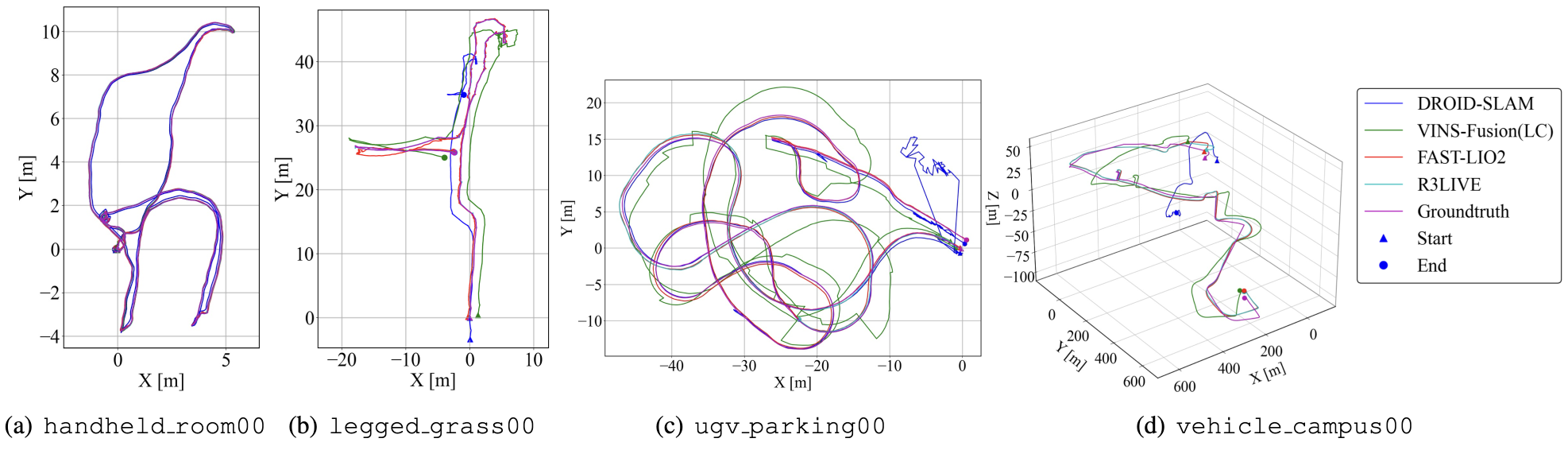
Running COIN-LIO : vehicle_tunnel00 (COIN-LIO)
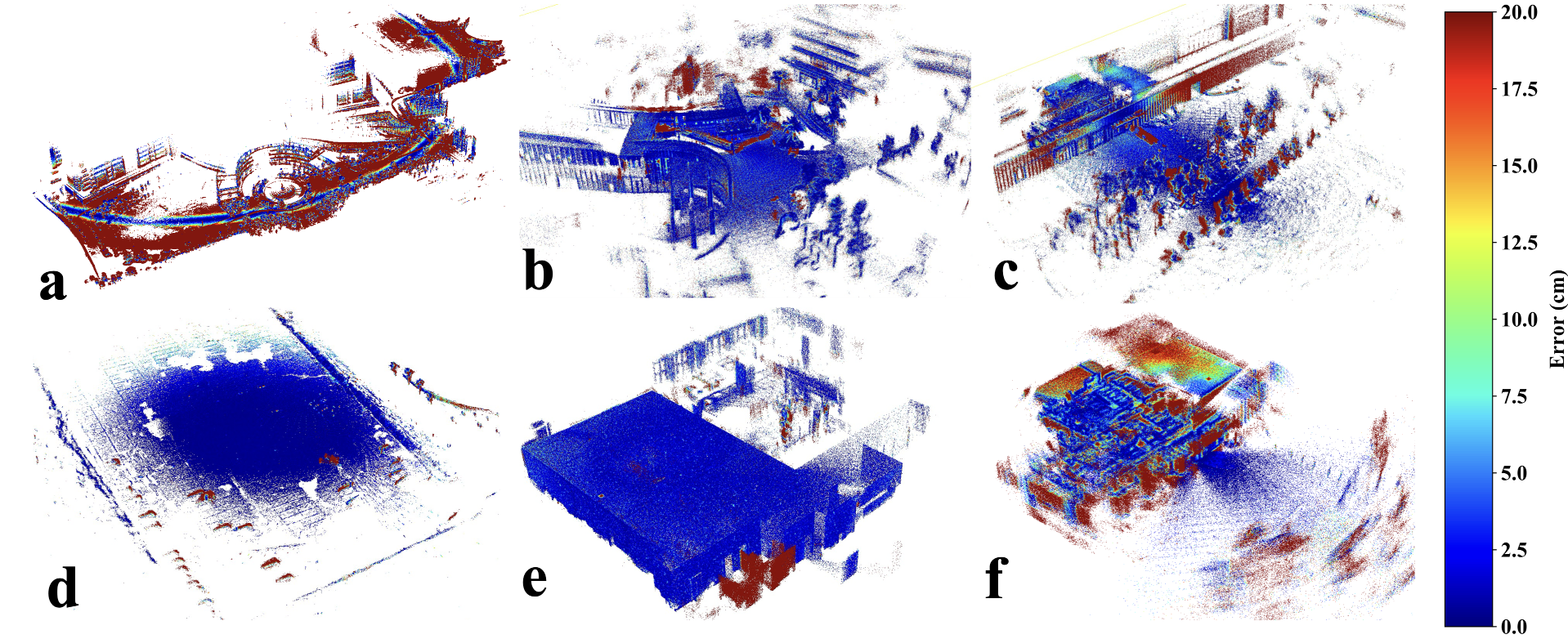
Mapping Evaluation¶
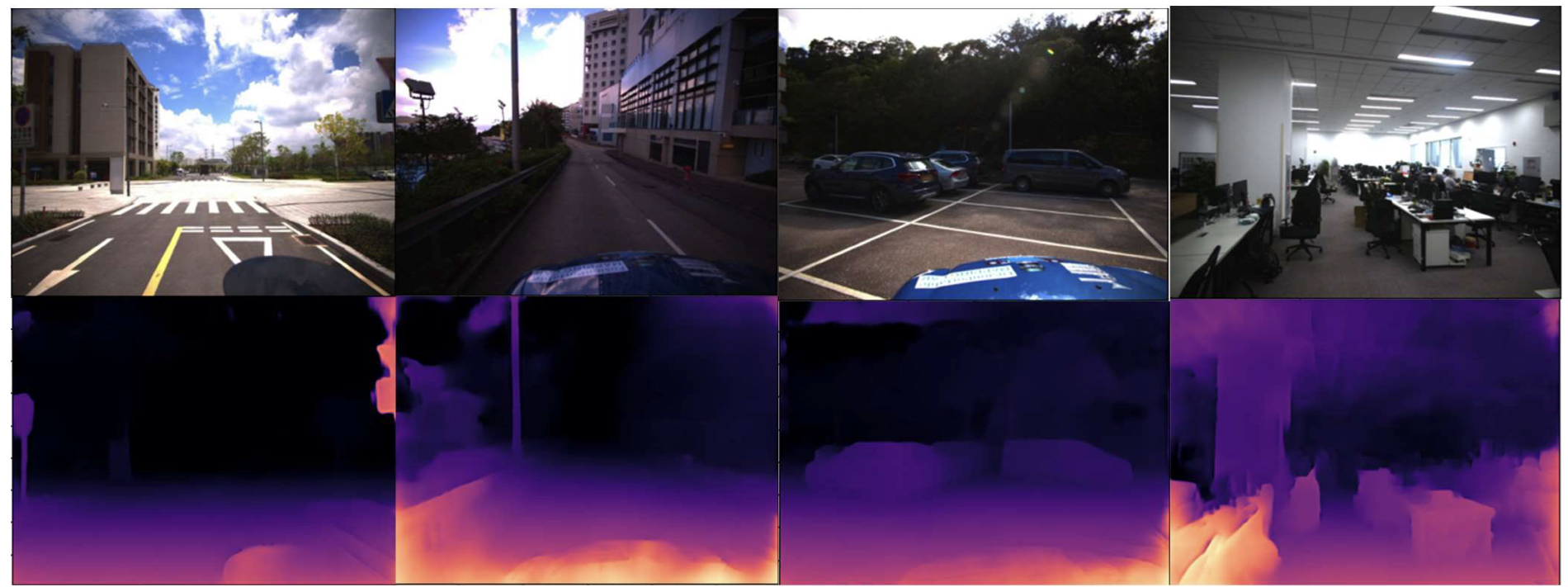
Perception Test (Monocular 3d Object Detection, Segmentation, Depth Estimation)¶
Utilizing the VisionFactory for training and testing vision tasks.
Navigation Demo in the Underground Parking Lot¶
Importing the GT map as the simulated environment (in Gazebo), we can employ the open-source CMU exploration package to achieve the navigation experiment.